附件4.格雷母线定位技术
格雷母线将电磁感应原理应用于位置检测和数据通信领域。格雷母线以相互靠近的扁平状的电缆和天线箱之间的电磁耦合来进行通信,并在通信的同时检测到天线箱在格雷母线长度方向上的位置。
格雷母线由一对基准线(R线)和多对地址线(G线)按格雷码规律编排构成。地址线每隔一定步长交叉一次,构成格雷码规律编排的感应环线,基准线在整段格雷母线中不交叉。
格雷母线通信定位装置由位置检测单元和数据通信单元组成。
4.1 格雷母线位置检测单元工作原理
格雷母线位置检测单元包括地址发射单元、天线箱、地址检测单元、格雷母线及安装辅件等部分。
利用最简单的单匝线圈的感应原理,当天线箱线圈中通入交变电流时,在天线箱附近会产生交变磁场。格雷母线近似处在一个交变的、均匀分布的磁场中,每对格雷母线芯线会产生感应电动势。发射单元地址信号通过电磁耦合方式传送到格雷母线的感应环线上。
地址检测单元对接收到的信号进行相位比较。交叉线的信号相位与平行线的信号相位相同,地址为“0”;交叉线的信号相位与平行线的信号相位相反,地址为“1”,这样感应的地址信息是格雷码排列,永不重复,由此确定移动站在格雷母线长度方向上的位置。
4.2 格雷母线数据通信单元工作原理
格雷母线数据通信单元包括发信机、天线箱、收信机、感应环线等部分。
在格雷母线中增加两对感应环线用于数据通信,通过电磁耦合在发信机和收信机之间传送信息,信息使用频率键控(FSK)方式调制,使用相干解调,标准通信速率4800bps或9600bps,通信误码率:10-7。
4.3 格雷母线通信定位装置特点
- 非接触工作方式:非接触工作方式,无滑脱和磨损等故障。
- 绝对位置检测:能够连续地、高精度地检测绝对地址,位置检测精度达5毫米,可以实现移动机车自动行走和全自动操作。
- 通信适用范围广:通过电磁耦合来进行通信,不受环境条件限制,接收灵敏度高。例如在隧道内空间电磁波便很难传送,格雷母线能实现通信。
- 不受无管会管制;数据通信的载频为低频,所产生的电磁场只限于几米范围,辐射比工厂使用高频无线电通信系统容许的级别低,不需要向无管会申请即可使用。
- 兼容性好:位置检测和数据通信可以合用一根格雷母线电缆,施工方便、安装维护简单,占空间小,不影响现场外观,不改变现场设备。
- 抗干扰能力强:使用交叉扭绞结构及相位检测技术,天线箱与格雷母线两者间隙从30毫米到300毫米均可正常工作,不受环境噪音和接收信号电平波动的影响,能够在诸如铁矿石场等恶劣环境条件中长期可靠的工作。
- 适用于恶劣的工业环境:格雷母线电缆、天线箱、始端箱、终端箱和段间箱采用非金属材料制作而且采用密封工艺,耐酸、碱腐蚀,防护等级IP54,使用寿命长。
4.4 格雷母线起重机通信定位装置构建模块
- 起重机走行位置检测:格雷母线电缆安装在起重机轨道旁,地址检测采用车上检测方式,地面站地址发射器通过格雷母线电缆芯线发射地址信号,起重机上的地址编码接收器直接得到本机走行方向的位置。
- 起重机小车走行位置检测:格雷母线电缆安装在起重机小车轨道旁,地址检测采用地上检测方式,地址发射器和地址编码接收器都安装在起重机上,起重机直接得到本机起重机小车的位置。
地址检测单元输出与中控PLC系统通讯,可以实现起重机自动走行,自动堆取料。同时可防止起重机两端掉道,防止起重机发生碰撞等事故。 - 起重机感应通信技术:格雷母线电缆中增加两对感应环线用于数据感应通信,地面站感应通信单元直接与远程监控系统计算机相连,车上感应通信单元与起重机上PLC相连,通过感应通信方式实现起重机与地面监控系统计算机的双向通信。
位置检测和数据通信可以合用一根格雷母线电缆,施工方便、安装维护简单,占空间小,不影响现场外观,不改变现场设备。所有实时工况均在一台工业控制计算机屏幕上显示,实现多台起重机的集中监视和控制。
4.5 格雷母线起重机通信定位装置的主要功能
- 实现起重机走行位置检测和起重机小车走行位置检测。
- 可以实现起重机自动走行,自动堆取料。
- 实现起重机与地面计算机的双向通信。
- 本起重机的位置指示,可防止起重机两端掉道。
- 其他起重机的位置指示,防止起重机发生碰撞等事故。
4.6 系统的主要技术指标
- 适应速度:0-200m/min。
- 位置检测精度:连续的绝对位置检测,检测精度10mm。
- 通信波特率:全双工通信,9600bps,通信误码率:<10-7。
- 信息调制方式:FSK方式。
- 工作温度:-20℃~+70℃。
附件5.电子防摇摆系统简介
起重机特别是大小车运行过程中,由于惯性原因会引起摇摆,其危害极大。(1)增加循环时间,降低生产效率。增加定位难度;增加循环时间。(2)潜在的碰撞危险,降低安全性能。引起货物破损;设备破环;人身伤害;降低空间利用率。(3)频繁的机械冲击,增加维护成本。增加电机负载;加剧机械部件例如钢丝绳、电缆、卷筒、制动器等的磨损。
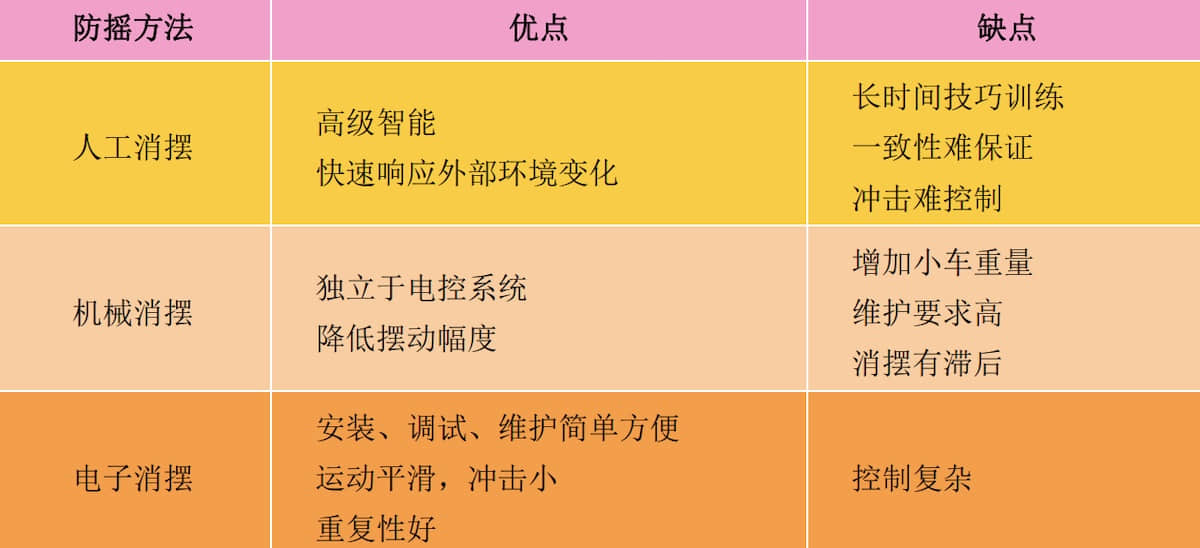
消除摇摆的方法有三种:人工消摆,机械减摇,电子防摇。
5.1 人工消摆的特点
- 熟练司机根据经验补偿负载摆动
- 需要数月甚至数年的经验
- 需要数月甚至数年的经验
- 司机需要长时间集中注意力
- 消摆过程降低负载处理速度

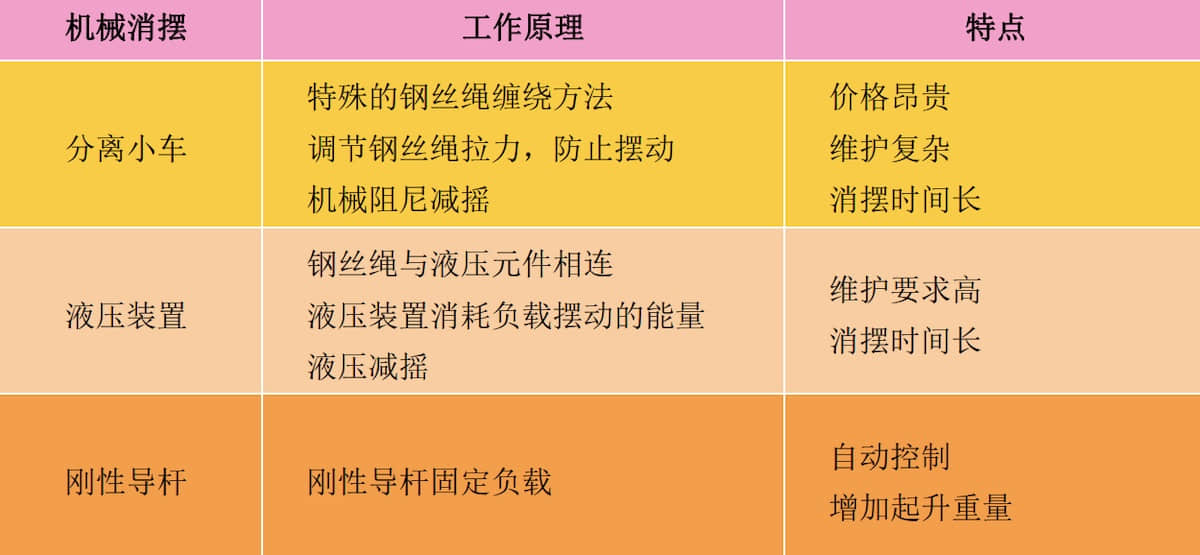
5.2 机械减摇的特点
5.3 电子防摇的特点
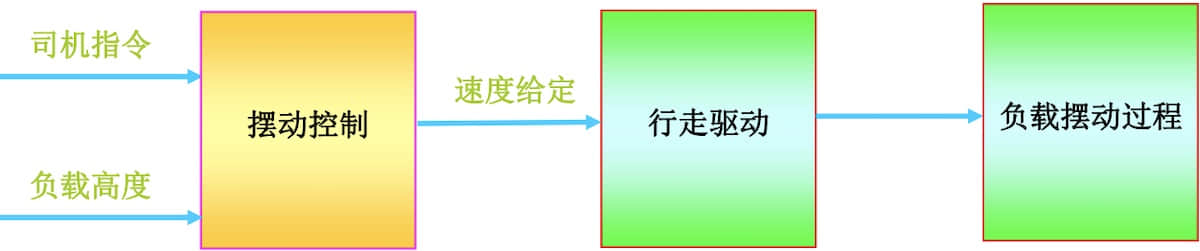
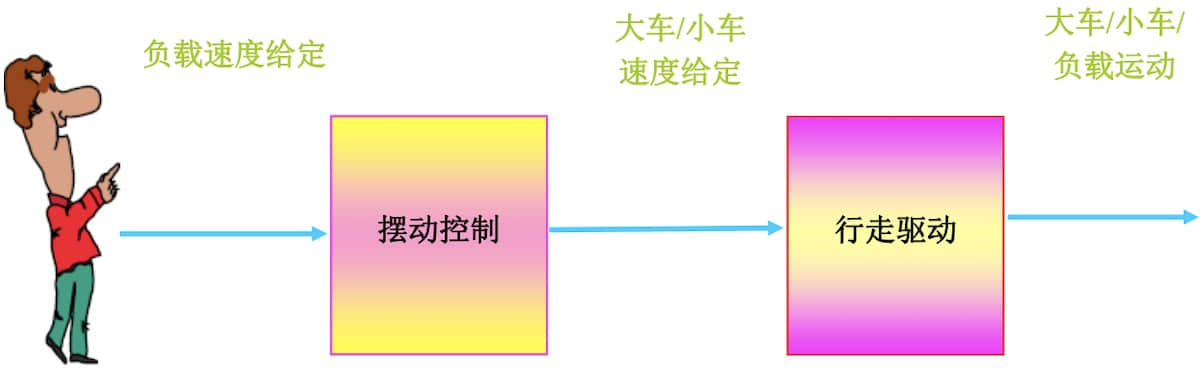
电子防摇则可根据期望的负载运动控制行走运动,使负载跟随司机的指令运动。
5.4 三种消除防摇的方法及特点
5.5 电子防摇的原理及图例
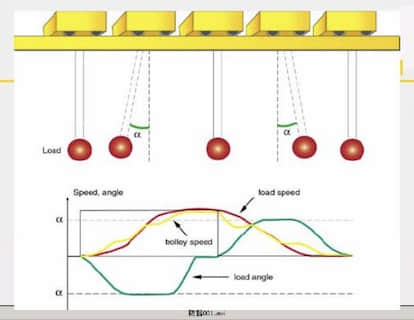
- 不需要摆角反馈,无摆动测量装置。不需要修改系统。
- 基于负载摆动过程的软件模型。
- 根据负载高度以及司机指令计算优化路径。帮助司机控制负载摆动,减轻司机的劳动强度。
- 适合于无法安装传感器测量负载摆动的场合,粉尘或高温等恶劣环境。
- 具有胜任任何作业的能力:短距离(mm)及长距离(km)运动;大车、小车和起升任意速度、加速度组合;内建“终点无摇减速功能”。
- 基于负载摆动过程的软件模型,根据负载高度以及司机指令计算优化路径。